I decided to try building the (standard, as cloned} firmware in preparation for building some of the new code I’ve written to support the anemometer/raingauge version of SCS. It is just to get the hang of it. and: That a make will download from Git all of the dependencies that will allow the code to be built, and remove the annoying error squiggles pointing to missing dependencies. This will then clear most of the 700 odd errors that I see in the coding window showing only actual coding errors.
I am running the process directly against the clone that I made of the FablabBCN repository of smartcitizen-kit-21 repo. It is unmodified version of the code.
And I have run into trouble at the first hurdle.
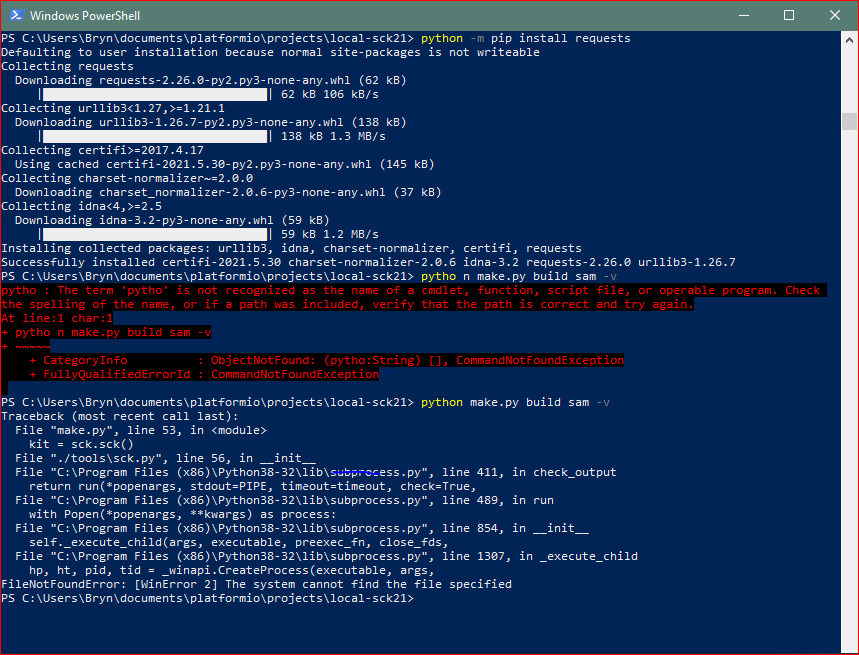
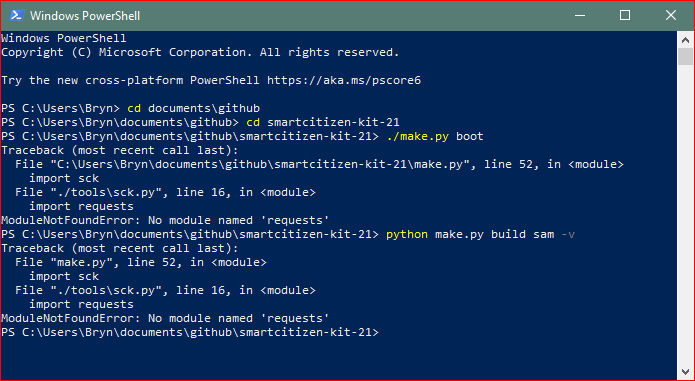
A basic make does not seem to work. I am obviously doing something wrong, or my environment is not set up correctly.
Looks to me like I am missing some files or folders. ‘requests’
(and its true, there is no folder named requests.)
Environment installed:
- : Toshiba Laptop running Windows 10
- Python 3.8 32 bit and Python 3.7 64 Bit
- VS Code with Platform IO 2.3.3
- Git 2.33.0.2
Please can you assist.
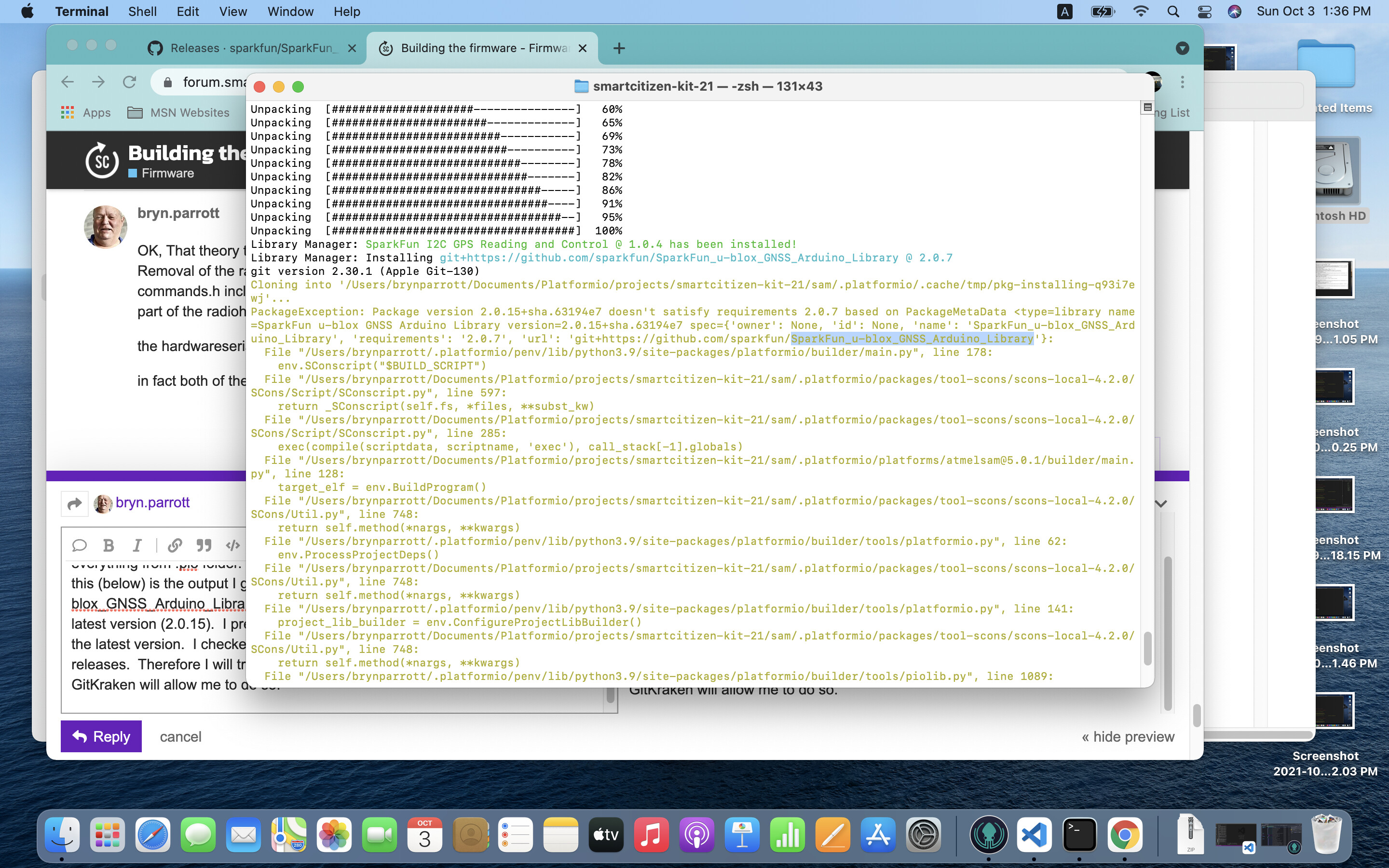
I have attached a screen shot of the feedback I got:
Many Thanks,
Bryn Parrott