@victor @oscgonfer [ please read until the end of this message]
I tried installation of a tool called ‘fsmonitor’; It displayed a lot of information; but none of it useful to this purpose of discovering whether ‘variant.h’ is touched during compilation.
OK; So… I tried another pathway; (
I cleaned out the .pio and .platformio folders (except for framework-arduino-samd)
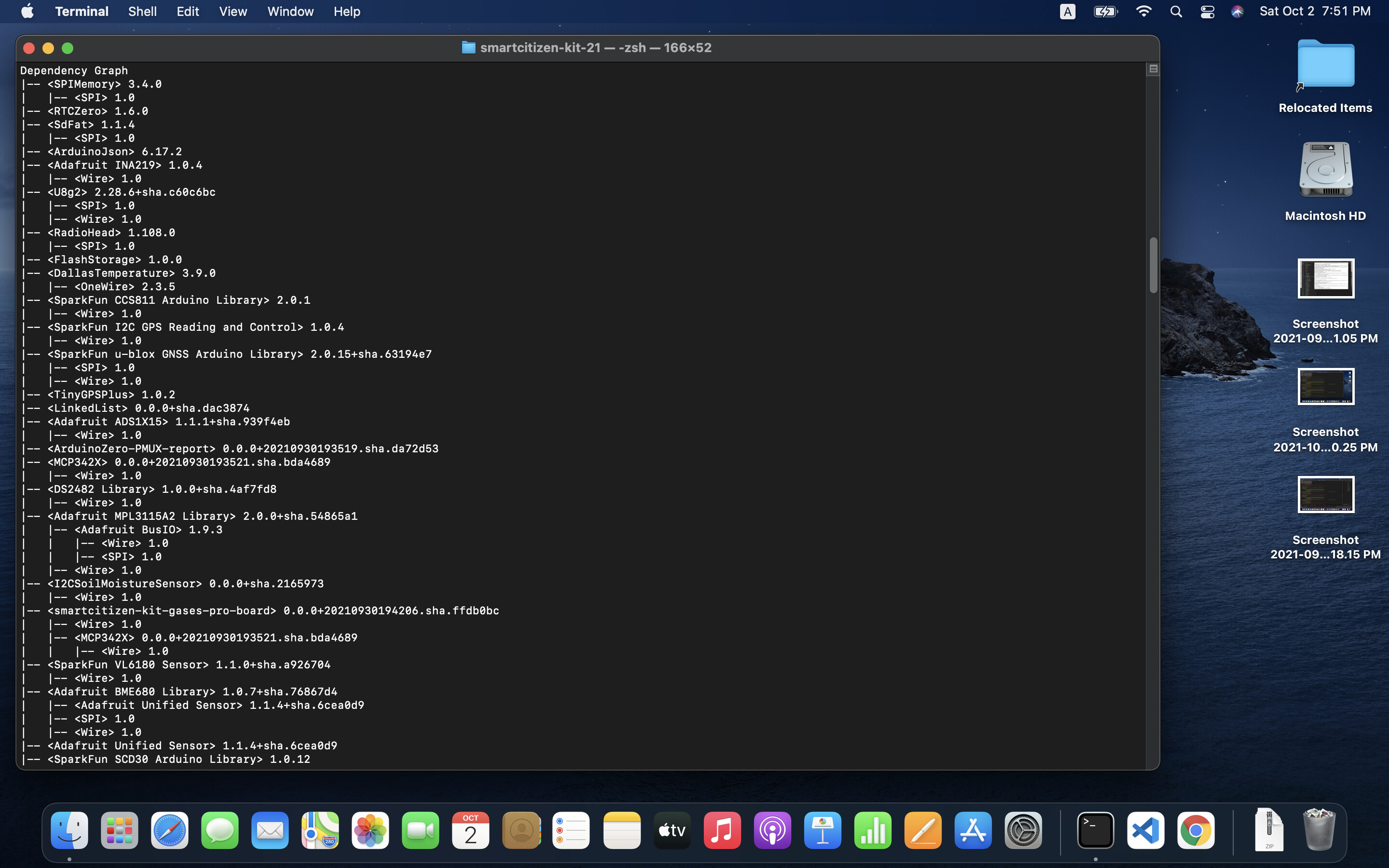
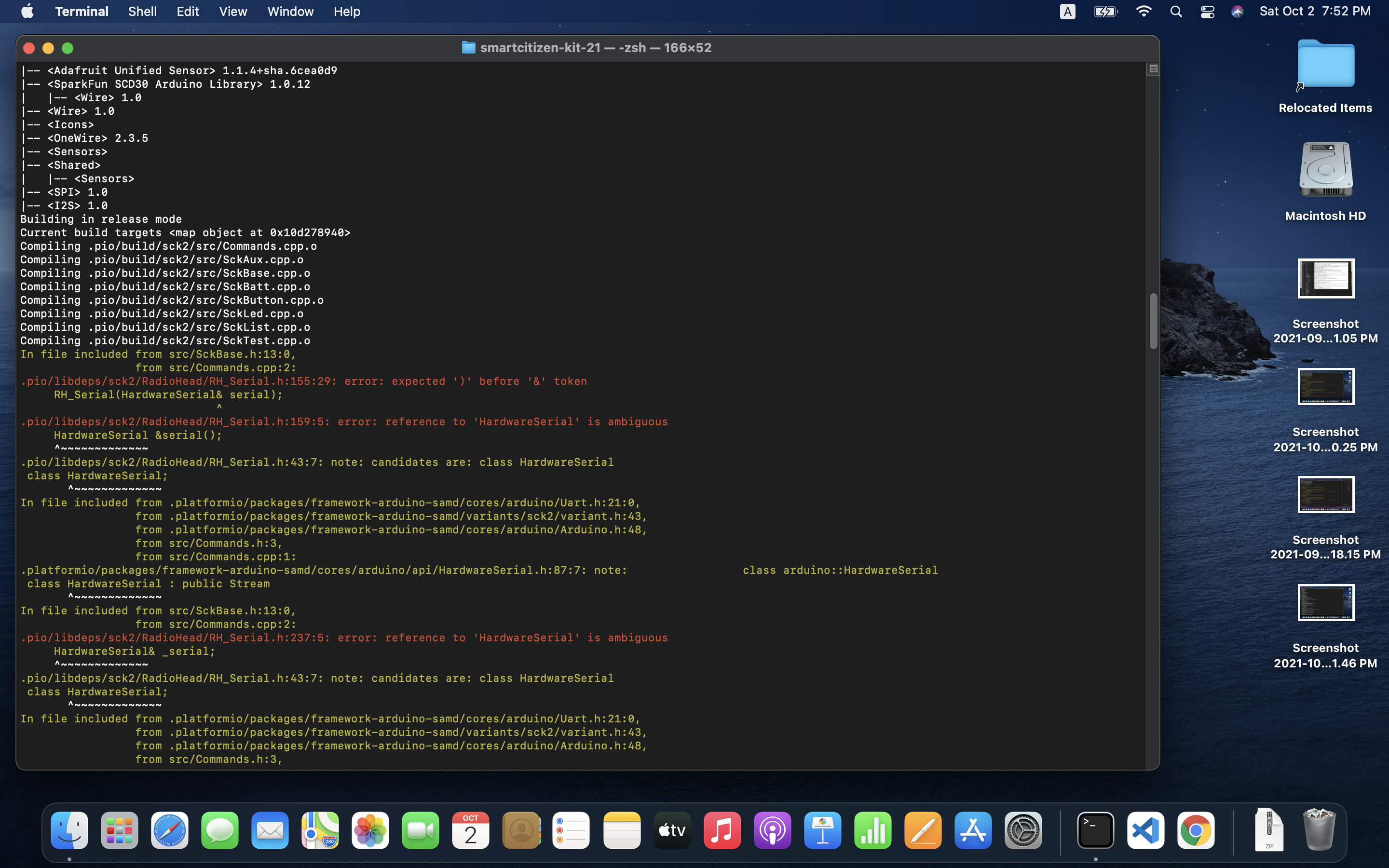
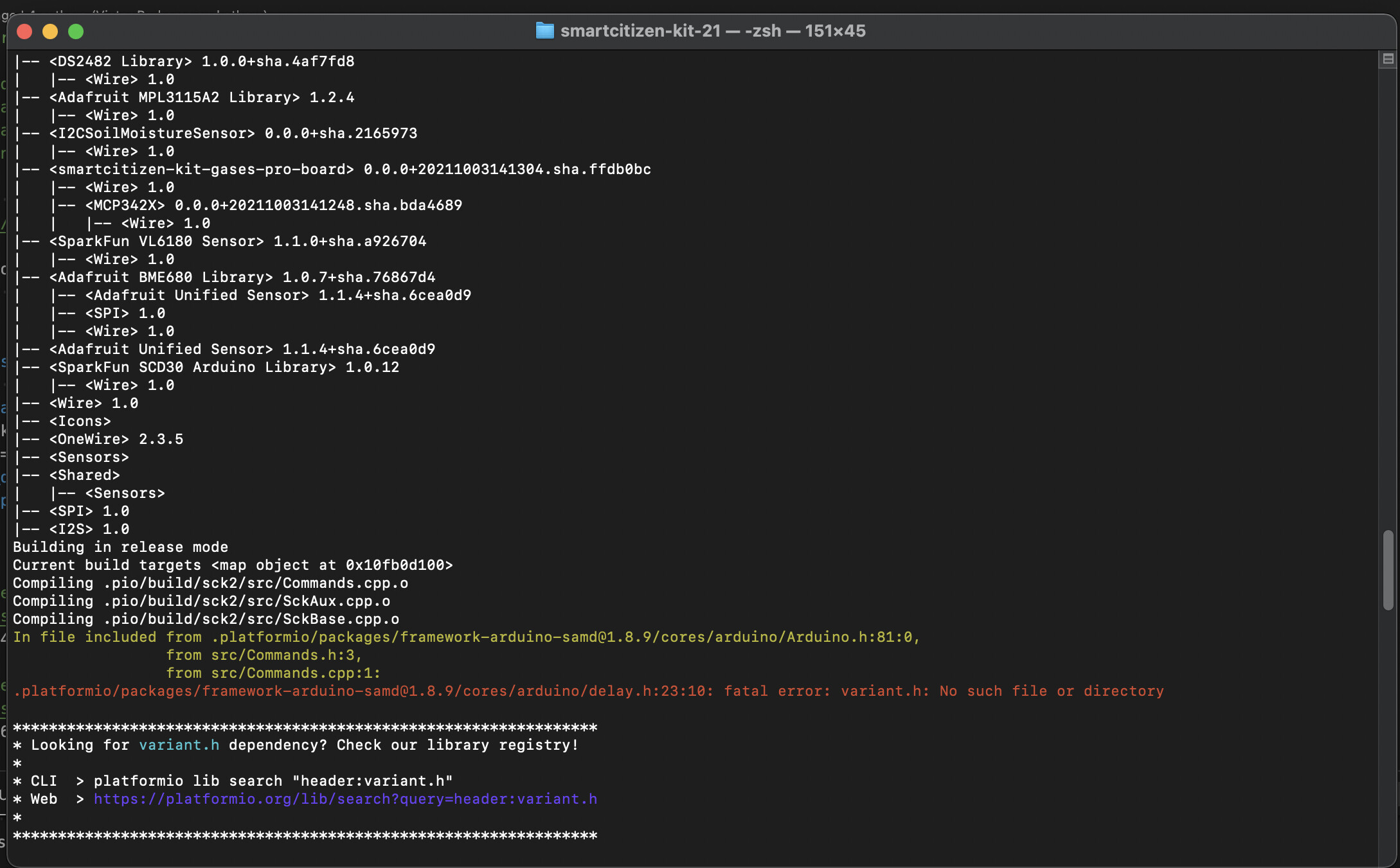
Then executed the make script. (and it got the same result as before - cannot find ‘variant.h’) (I am not surprised by this.)
then looked at the folders that were installed into .platformio
I notice that there are two folders for framework-arduino-samd.
one called framework-arduino-samd
the other called framework-arduino-samd@1.8.9
The difference between these two folders:(?)
- framework-arduino-samd@1.8.9 has ‘extras’ folder
- it has variants folder that does not contain a sck2 fubfolder and hence no variant.h for the sck2
-framework-arduino-samd has:
- NO extras folder
- variants folder contains subfolder sck2
It seems possible that maybe the make process looks for ‘variant.h’ within the framework-arduino-samd@1.8.9 folder; and does not find the sck2 folder so it gives up ‘file not found’; But why are there two folders ?
So… I tried one more thing. I copied the folder ‘sck2’ from one folder to the other.
Then I ran the make file again. Here are the last two lines of output:
We found 197.04MB of unnecessary PlatformIO system data (temporary files, unnecessary packages, etc.).
Use pio system prune --dry-run to list them or pio system prune to save disk space.
Wrote 446976 bytes to /Users/brynparrott/Documents/Platformio/projects/smartcitizen-kit-21/bin/SAM_firmware.uf2.
.
Lo and behold; the make process has executed from beginning to end successfully.
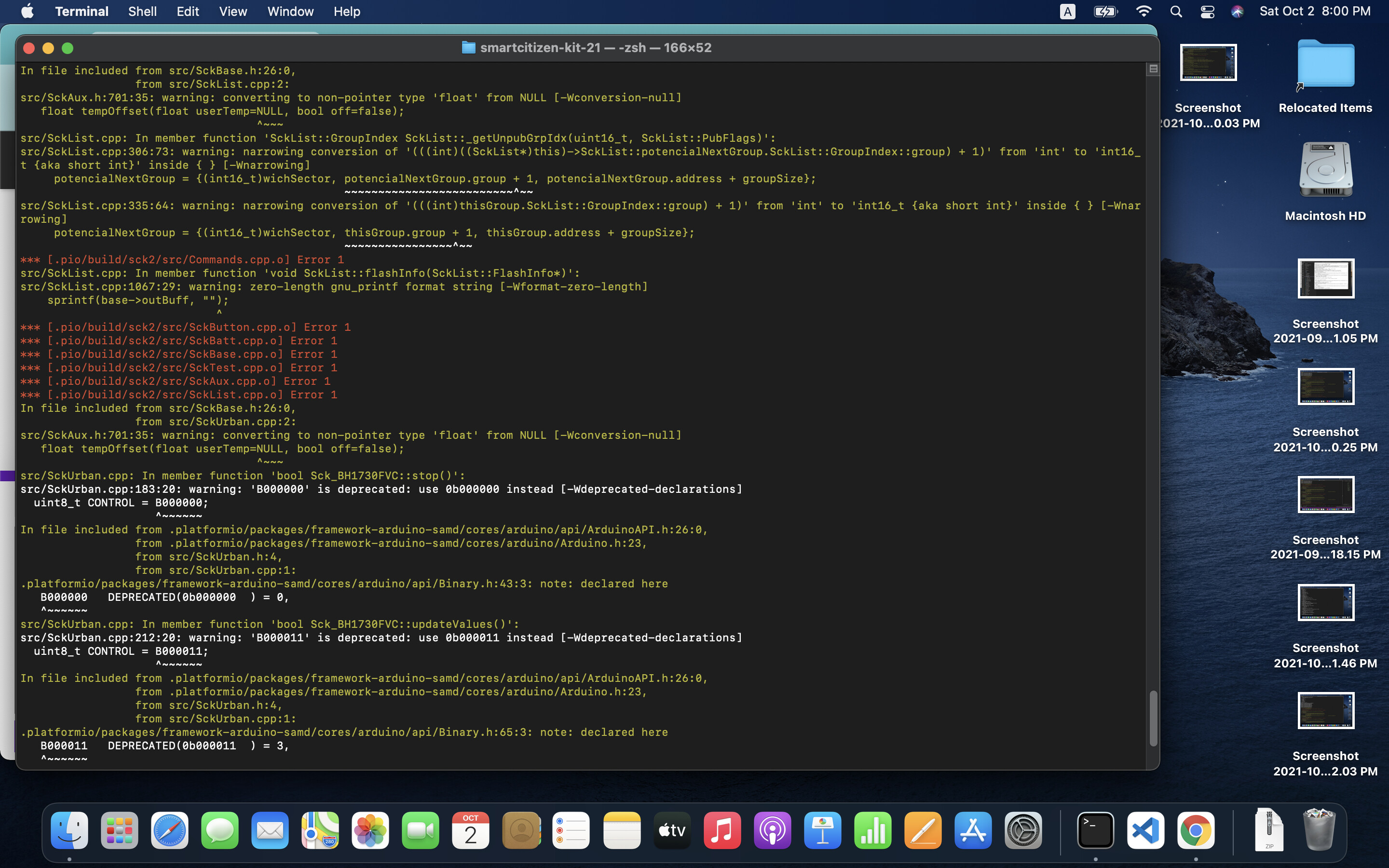
It gave up a few warning messages; but completed and delivered a firmware file. I have no idea if it works or not. I will look into a few of the warning messages to see if they look important; before loading it into my scs data board.
For you to consider is the cause of this issue and whether and how to correct it.
Maybe it just needs a documentation fix (simplest) or …